ROS-robotplattform
träffar: 162
Nyckelord: ROS-robotplattform / open source robotplattform / ROS-robotkit
Fem fördelar med produkter
Fem fördelar med produkter
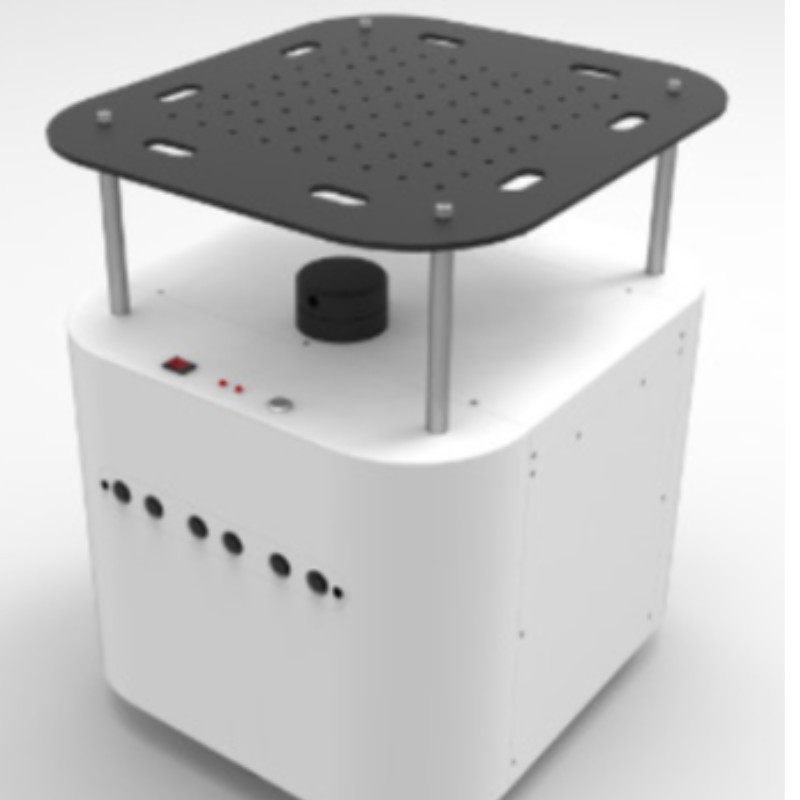
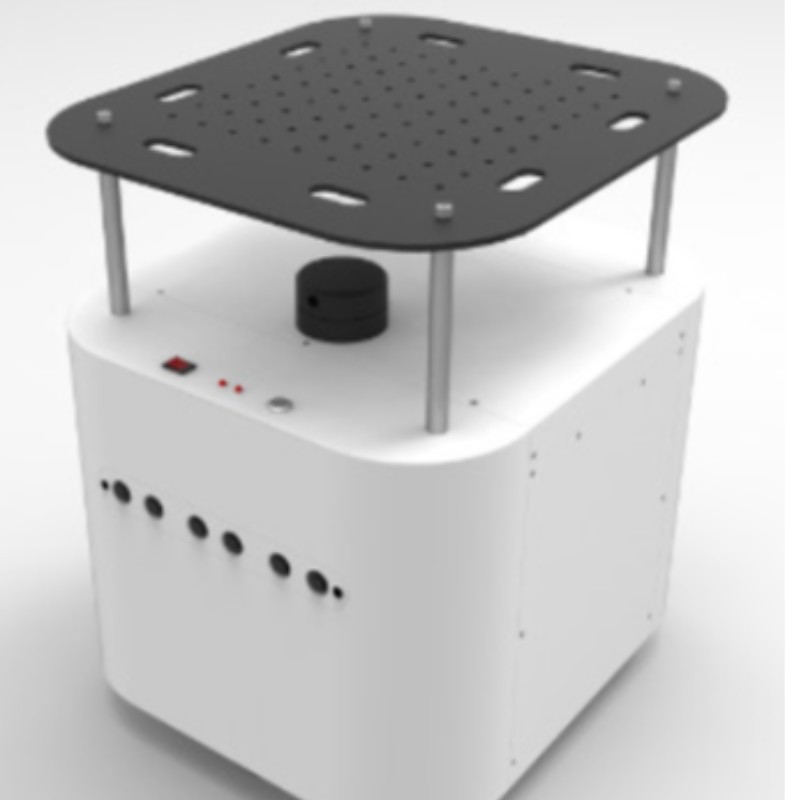
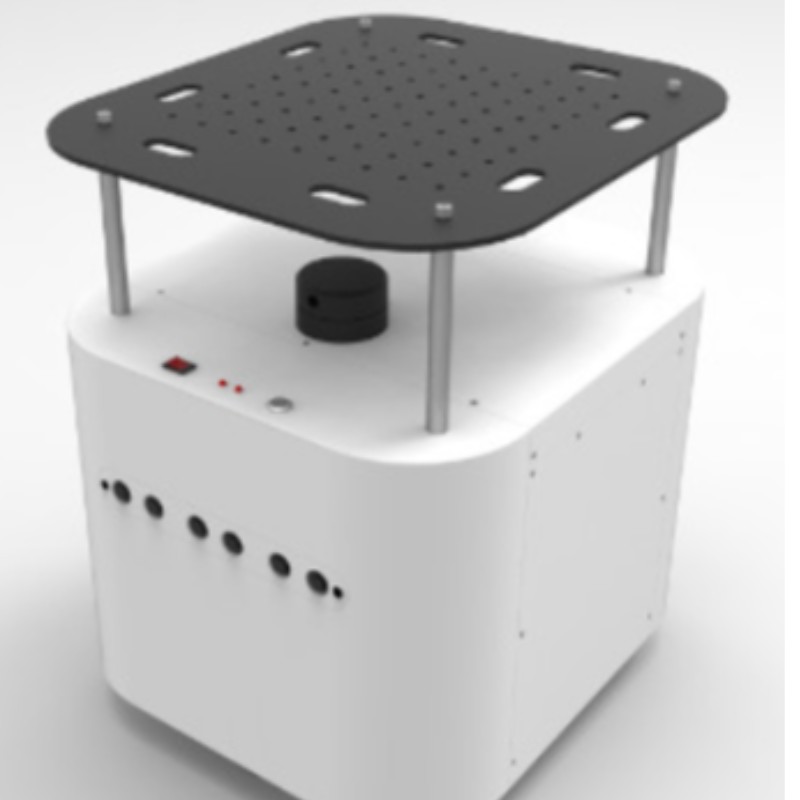
- YZ-01 ROS-robotplattform är en tvåhjulsdifferential- och storlastrobotningschassiplattform baserad på ROS-arkitektur. Den är mycket lämplig för användning av ROS-robotentusiaster, studenter och små och medelstora FoU-ingenjörer.
- Chassiplattformen är en integrerad navmotor med hög verkningsgrad och hög belastning. Plattformen kan ladda upp till 50KG, och den maximala gånghastigheten kan nå 1 meter per sekund. YZ-01: s inbyggda DCDC-effektomvandlingsmodul kan ge fyra olika spänningar på 5V, 12V, 19V och 24V, vilket i princip kan lösa strömförsörjningsproblemen hos de allra flesta datormoderkort och olika sensorer som roboten behöver bära.
- För att underlätta utvecklare att göra djupgående forskning har ROS-plattformen inbyggd Intel Core-i5 industriell PC och installerat UBUNTU 16.04 O \/ S + ROS Kinetic-paket. Samtidigt ger ROS-robot YZ-01A, liksom andra ROS-plattformsrobotar, öppna källkodsprogram med grundläggande ROS och grundläggande rörelsedrivna nodprogram som gör det möjligt för utvecklare att använda det mycket enkelt.
- ROS-kommunikation RS232 、 USB
- Automatisk laddguide LIDAR + Infraröd sensor
Produktinformation
Produktinformation
Specifikation för ROS-robotplattform YZ-01A
YZ-01 ROS-robotplattform är en tvåhjulig differential och en stor robot-rörelseplattform baserad på ROS-arkitektur.Den är mycket lämplig för användning av ROS-robotentusiaster, collegestudenter och små och medelstora företag R
&
D ingenjörer.
Chassiplattformen är en integrerad navmotor med hög effektivitet och hög belastning.Plattformen kan laddas upp till 50KG, och den maximala gående hastigheten kan nå 1-meter per sekund.YZ-01 och_.39.DCPC:s inbyggda effektkonverteringsmodul kan ge fyra olika spänningar av 5V, 12V, 19V och 24V, som i grund och botten kan lösa problemen med strömtillförseln hos den stora majoriteten av datormoderkort och olika sensorer som roboten behöver bära.
För att underlätta för utvecklare att göra fördjupad forskning har plattformen för avkastning på försäljning byggt in Intel Core-i5 industriella PC och installerat UBUNTU 16.04 O/S + ROS Kinetiska paket.Samtidigt tillhandahåller ROS-robot YZ-01A, precis som andra ROS-plattforms-robotar, grundexempel på ROS-program med öppen källkod och grundläggande rörelsestyrda nodprogram som gör det möjligt för utvecklare att använda dem mycket enkelt.
Förfrågan
2026 Shenzhen ABT Electronics CO.,LTD Alla rättigheter förbehållna.